STAR DELTA connection Diagram and Working principle
Descriptions: A Dual starter connects the motor terminals directly to the power supply. Hence, the motor is subjected to the full voltage of the power supply. Consequently, high starting current flows through the motor. This type of starting is suitable for small motors below 5 hp (3.75 kW).
Reduced-voltage starters are employed with motors above 5 hp. Although Dual motor starters are available for motors less than 150kW on 400 V and for motors less than 1 MW on 6.6 kV.
Supply reliability and reserve power generation dictates the use of reduced voltage or not to reduce the starting current of an induction motor the voltage across the motor need to be reduced. This can be done by 1. Autotransformer starter, 2. Star-delta starter or 3. Resistor starter. Now-a-days VVVF drive used extensively for speed control serves this purpose also.
In dual starter the motor is directly fed from the line and in star delta starter then motor is started initially from star and later during running from delta. This is a starting method that reduces the starting current and starting torque. The Motor must be delta connected during a normal run, in order to be able to use this starting method.
The received starting current is about 30 % of the starting current during direct on line start and the starting torque is reduced to about 25 % of the torque available at a D.O.L start.
More: Star/Delta starters are probably the most common reduced voltage starters in the 50Hz world. (Known as Wye/Delta starters in the 60Hz world). They are used in an attempt to reduce the start current applied to the motor during start as a means of reducing the disturbances and interference on the electrical supply.
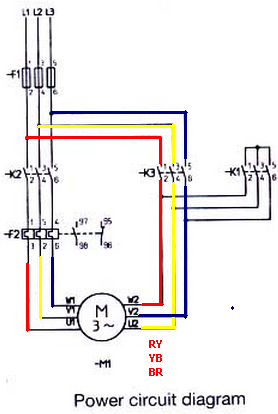
Component: The Star/Delta starter is manufactured from three contactors, a timer and a thermal overload. The contactors are smaller than the single contactor used in a Direct on Line starter as they are controlling winding currents only. The currents through the winding are 1√3 = 0.58 (58%) of the current in the line. this connection amounts to approximately 30% of the delta values. The starting current is reduced to one third of the direct starting current.
How it works?
There are two contactors that are close during run, often referred to as the main contactor and the delta contactor. These are AC3 rated at 58% of the current rating of the motor. The third contactor is the star contactor and that only carries star current while the motor is connected in star. The current in star is one third of the current in delta, so this contactor can be AC3 rated at one third of the motor rating.
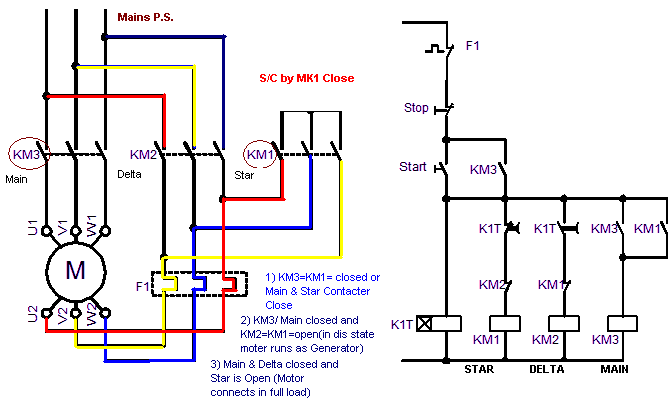
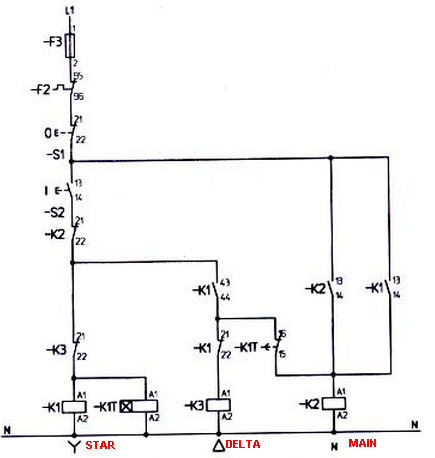
In operation, the Main Contactor (KM3) and the Star Contactor (KM1) are closed initially, and then after a period of time, the star contactor is opened, and then the delta contactor (KM2) is closed. The control of the contactors is by the timer (K1T) built into the starter. The Star and Delta are electrically interlocked and preferably mechanically interlocked as well. In effect, there are four states:
- OFF State. All Contactors are open
- Star State. The Main and the Star contactors are closed and the delta contactor is open. The motor is connected in star and will produce one third of DOL torque at one third of DOL current.
- Open State. The Main contactor is closed and the Delta and Star contactors are open. There is voltage on one end of the motor windings, but the other end is open so no current can flow. The motor has a spinning rotor and behaves like a generator.
- Delta State. The Main and the Delta contactors are closed. The Star contactor is open. The motor is connected to full line voltage and full power and torque are available.
This type of operation is called open transition switching because there is an open state between the star state and the delta state.
 |  |